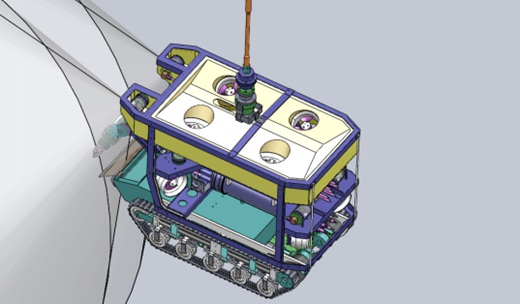
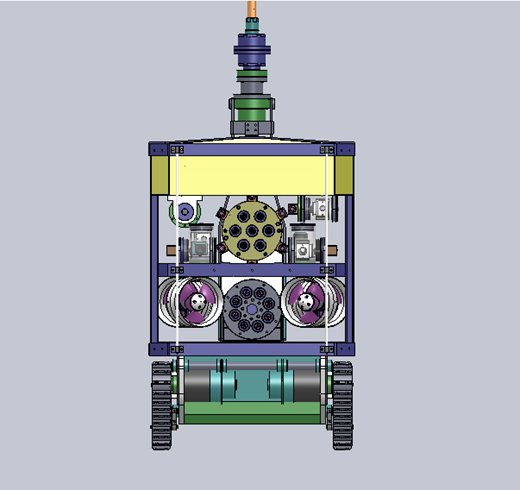
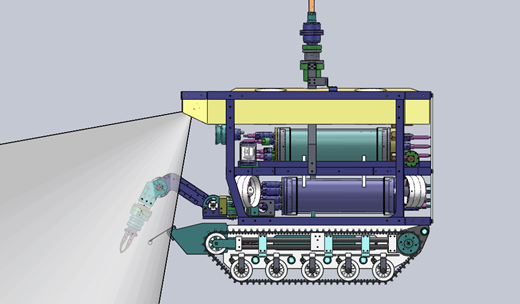
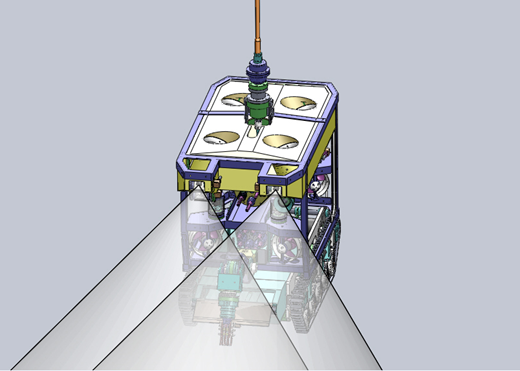
T20单机械手履带水下机器人是针对国内水下环境开发的一种中端中型无人有缆遥控潜水器,是体积较小的经济中型ROV,拥有单5功能液压机械手、2条履带性能超群的水下爬行履带、8个推进器,采用1000V直流远距离输电,总功率升级至12KW。采用4路旋转摄像头+照明灯配置,可方便水下多角度视场观察。

用户可搭载多款水下工具,匹配优越的越野履带水下爬行能力,加上5功能机械手,既具备常规ROV的水中浮游功能,还可以实现海底稳定行走,便于机械手精准水下作业,是征战激流险滩浑浊水域最佳装备。
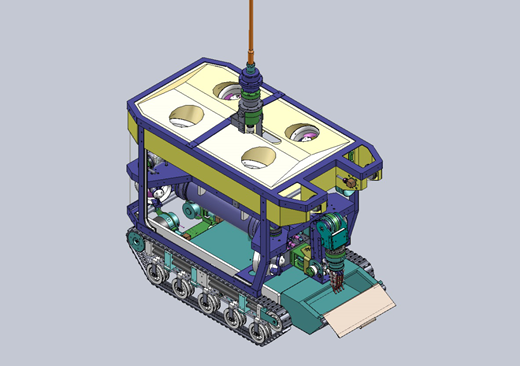
该产品的履带和采样箱可以拆卸,便于迅速转换成水中飞行模式,便于展开大范围水底搜寻,采用船电连续供电,提供连续长时间作业。
多任务搭载设计,预留电源和通讯端口,可以搭载多种工具包或仪器,用于水下救援,样品采集、小规模打捞、科学考察等多种作业。
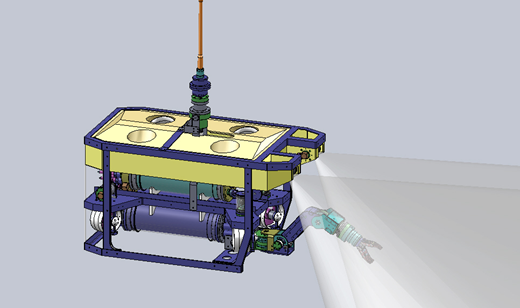
最显著的优势是海底作业,可以沿海底顶流爬行,特别适合于抗急流、零视距的浑浊水域,搭载声呐可以用于近浅海和内陆湖泊、江河航道等场所,甚至充水涵道等闭塞空间。
一、总参数
全尺寸外围体积运输净尺寸(长×宽×高): 1260×650×1120 (mm)
配电总功率:220V 12KW。
空气中重量:约150KG
单5功能液压机械手
越野履带2条。
8个推进器,4和水平矢量,4个垂直升降。
4个摄像头和4个照明灯,3旋转云台。
耐压等级:300米
拖缆长度:一光两电零浮力拖缆,破断力3吨,工作拉力1吨,标配300米,
(另配绞车可至500米)。高压直流输电,1000V,12A。
带显示屏操作台一体含高压配电柜一个。
坦克式履带设计,水下爬坡越障性能优越,可越过200毫米断墙。陆地爬坡能力大于20°,水下可沿起伏长坡实现水底爬行。
浮体和配重灵活选择,水中飞行和水底爬行自由切换,
调节配重与浮力,可有效避免水底淤泥困扰。
抗激流的稳定水底爬行模式,非常方便仪器探测和水下工具作业。
配备前视声呐,在零视距的浑浊水域也可非常稳定的抵近作业。
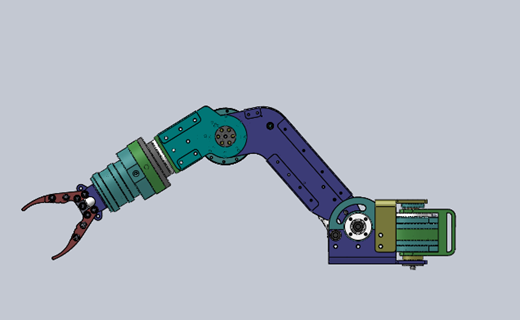
二、机械手参数
5功能是指手臂的4个回旋自由度和1个钳口夹紧。其中手腕可以实现360度连续旋转,握手钳和平口钳可以更换。
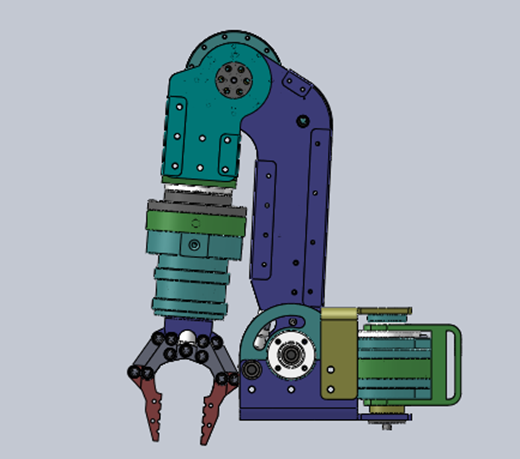
5功能平口钳
5功能握手钳
机械手与真人手臂大小差不多。
握手钳最大开口98mm,喉深84mm,最大手宽58mm,手心握持力10公斤。
平口钳最大开口46mm,喉深80mm,钳宽36mm,钳头外中心握持力8.2公斤。
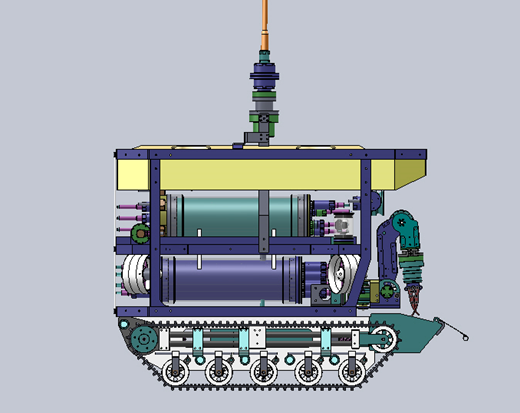
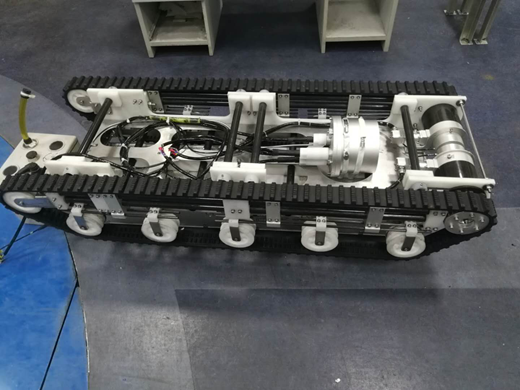
三、履带参数
履带是水下机器人的最显著配置。
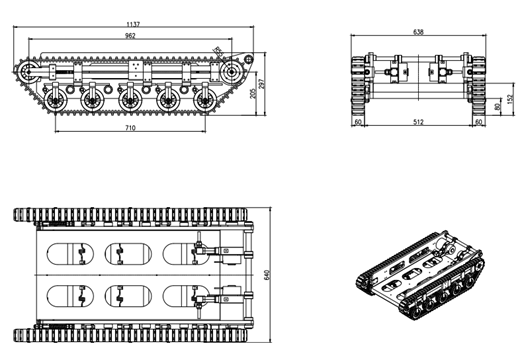
采用缓冲减震,多支重轮结构,水下耐腐蚀铜压缩弹簧设计,合理搭配驱动空间。
本结构有效分配空间,降低了驱动重心,增加了越障能力,实现最小重量提供最大越障水平是ROV的最大优点。
总体最大外围尺寸为1137mm×640mm×297mm(长×宽×高),底盘离地高度80mm,越障能力为200mm。履带带宽60mm, 一款水下全地形履带底盘。
空气中设计负载重150Kg,自重70Kg,总重允许至220Kg。牵引力测试数据,空载时塑胶路面牵引力为46KG,满载时94KG。额定时速为0.8米/秒(空气中平坦公路测试),最大时速1.6米/秒。
四、推进器
配备8个磁耦合螺旋桨。其中 4个水平矢量布置,负责前后、左右等水平方向任一角度平动,还可左右转弯;另外4个垂直布局,负责上下升降移动,还可调整本体倾斜角度。
五、水下摄像机、照明灯及云台
4路以上高清图像实时动态无延迟模拟图像,用于机械手操控和机器人运动动作。前视摄像头和照明灯带云台功能,可随时旋转,方便水下观察。前视主摄像头为3路200万实时无延迟高清低照度星光级彩色摄像头 ,强光为彩色,弱光转为黑白。
后视摄像头符合汽车倒车实时反影像习惯,无时间延迟,带转弯陀螺仪显示轨迹,高清1080P,弱光下可视。
1路高清数字图像,用于各种参数合成显示,包括电子罗盘、姿态仪、温度、水深等参数。此摄像头位于机械手处,为全景鱼眼镜头,不旋转。
照明系统:共4路,其中3路高亮度汽车LED大灯 , 1路普通LED灯。
六、动力系统及通讯
输入交流220V 65A动力供电, 12KW,高压远距离直流输电1000V12A,配备专业开发水下直流电源,大功率,动力强劲。
可船电或发电机连续供电,长时间不停歇作业,不需要停机充电。
配备零浮力光电复合拖缆,缆车带旋转光电接头,方便动态收放作业。
光纤传输500M以上大带宽。
T20 ROV,专为中国而生!
T20单机械手履带水下机器人是针对国内水下环境开发的一种中端中型无人有缆遥控潜水器,是体积较小的经济中型ROV,拥有单5功能液压机械手、2条履带性能超群的水下爬行履带、8个推进器,采用1000V直流远距离输电,总功率升级至12KW。采用4路旋转摄像头+照明灯配置,可方便水下多角度视场观察。
用户可搭载多款水下工具,匹配优越的越野履带水下爬行能力,加上5功能机械手,既具备常规ROV的水中浮游功能,还可以实现海底稳定行走,便于机械手精准水下作业,是征战激流险滩浑浊水域最佳装备。
该产品的履带和采样箱可以拆卸,便于迅速转换成水中飞行模式,便于展开大范围水底搜寻,采用船电连续供电,提供连续长时间作业。
多任务搭载设计,预留电源和通讯端口,可以搭载多种工具包或仪器,用于水下救援,样品采集、小规模打捞、科学考察等多种作业。
最显著的优势是海底作业,可以沿海底顶流爬行,特别适合于抗急流、零视距的浑浊水域,搭载声呐可以用于近浅海和内陆湖泊、江河航道等场所,甚至充水涵道等闭塞空间。
一、总参数
全尺寸外围体积运输净尺寸(长×宽×高): 1260×650×1120 (mm)
配电总功率:220V 12KW。
空气中重量:约150KG
单5功能液压机械手
越野履带2条。
8个推进器,4和水平矢量,4个垂直升降。
4个摄像头和4个照明灯,3旋转云台。
耐压等级:300米
拖缆长度:一光两电零浮力拖缆,破断力3吨,工作拉力1吨,标配300米,
(另配绞车可至500米)。高压直流输电,1000V,12A。
带显示屏操作台一体含高压配电柜一个。
坦克式履带设计,水下爬坡越障性能优越,可越过200毫米断墙。陆地爬坡能力大于20°,水下可沿起伏长坡实现水底爬行。
浮体和配重灵活选择,水中飞行和水底爬行自由切换,
调节配重与浮力,可有效避免水底淤泥困扰。
抗激流的稳定水底爬行模式,非常方便仪器探测和水下工具作业。
配备前视声呐,在零视距的浑浊水域也可非常稳定的抵近作业。
二、机械手参数
5功能是指手臂的4个回旋自由度和1个钳口夹紧。其中手腕可以实现360度连续旋转,握手钳和平口钳可以更换。
5功能平口钳
5功能握手钳
机械手与真人手臂大小差不多。
握手钳最大开口98mm,喉深84mm,最大手宽58mm,手心握持力10公斤。
平口钳最大开口46mm,喉深80mm,钳宽36mm,钳头外中心握持力8.2公斤。
三、履带参数
履带是水下机器人的最显著配置。
采用缓冲减震,多支重轮结构,水下耐腐蚀铜压缩弹簧设计,合理搭配驱动空间。
本结构有效分配空间,降低了驱动重心,增加了越障能力,实现最小重量提供最大越障水平是ROV的最大优点。
总体最大外围尺寸为1137mm×640mm×297mm(长×宽×高),底盘离地高度80mm,越障能力为200mm。履带带宽60mm, 一款水下全地形履带底盘。
空气中设计负载重150Kg,自重70Kg,总重允许至220Kg。牵引力测试数据,空载时塑胶路面牵引力为46KG,满载时94KG。额定时速为0.8米/秒(空气中平坦公路测试),最大时速1.6米/秒。
四、推进器
配备8个磁耦合螺旋桨。其中 4个水平矢量布置,负责前后、左右等水平方向任一角度平动,还可左右转弯;另外4个垂直布局,负责上下升降移动,还可调整本体倾斜角度。
五、水下摄像机、照明灯及云台
4路以上高清图像实时动态无延迟模拟图像,用于机械手操控和机器人运动动作。前视摄像头和照明灯带云台功能,可随时旋转,方便水下观察。前视主摄像头为3路200万实时无延迟高清低照度星光级彩色摄像头 ,强光为彩色,弱光转为黑白。
后视摄像头符合汽车倒车实时反影像习惯,无时间延迟,带转弯陀螺仪显示轨迹,高清1080P,弱光下可视。
1路高清数字图像,用于各种参数合成显示,包括电子罗盘、姿态仪、温度、水深等参数。此摄像头位于机械手处,为全景鱼眼镜头,不旋转。
照明系统:共4路,其中3路高亮度汽车LED大灯 , 1路普通LED灯。
六、动力系统及通讯
输入交流220V 65A动力供电, 12KW,高压远距离直流输电1000V12A,配备专业开发水下直流电源,大功率,动力强劲。
可船电或发电机连续供电,长时间不停歇作业,不需要停机充电。
配备零浮力光电复合拖缆,缆车带旋转光电接头,方便动态收放作业。
光纤传输500M以上大带宽。
T20 ROV,专为中国而生!








