






新闻中心
科技前沿▏探地雷达在水下考古中的机遇与挑战
一、引言
我国拥有近300 万平方公里的辽阔海域、1.8万公里的大陆海岸线和丰富的内陆水域,蕴藏着种类多样、数量巨大的水下文化遗产,具有深厚的文化底蕴。这些文物承载着中华民族的灿烂文明。水下考古,已经不再只是单纯的水下探宝,更多的是通过对文物遗迹的整理,将时间碎片准确地关联起来,窥探古代精巧技艺和繁荣的商贸往来,重现真实的历史面貌。
上世纪八十年代中叶,英国人迈克·哈彻在南海发现并盗捞了“哥德瓦尔森”号沉船的文物,正是这桩“海洋盗宝案”将水下考古带入了大众的视野。1987年,南宋古沉船“南海Ⅰ号”的发现与打捞,也见证了中国水下考古从无到有、迅速发展的历程长期以来,在人们的认知中,水下文物难于发现、标定困难,相对于陆上考古而言水下考古难度更大。但也正因水下特殊环境使得诸多水下文物免遭于盗掘者的破坏。更有研究表明,黑暗低温低氧的水下环境对遗迹遗址的保存效果要远远好于陆上。例如,沉没在水底的船只往往可以保存数百年之久。

然而,深水拖网捕鱼作业等人类活动的发展,以及装备日渐高科技的盗掘团伙,使得这些文物现如今正处于危险边缘,二者对水下文化遗产所造成的破坏令人痛心疾首;除却人为因素,自然环境变化也加速了水下文物的消亡,比如恶劣的天气也可能会造成浅水区域的沉船发生不同程度的损毁,水的物理、化学侵蚀作用以及生物活动则使得遗迹的外表慢慢地变得难以识别。为了能够帮助考古学家发现、保护和重建那些淹没在水下的文化遗迹,非常有必要开展水下情况调查,圈定遗迹的分布范围并了解其结构特征。
目前,我国水下考古工作模式仍以渔民提供线索、潜水核实为主,主动性和主导性欠缺,所受限制较大。本文从水下考古探测方法的发展与现状入手,以宁波上林湖后司岙水域水下考古为切入点,引入利用探地雷达开展水下考古目标探测的思想,结合实际应用情况,深入剖析了探地雷达方法在水下考古领域中的机遇与挑战。
二、水下考古探测方法概述
水下考古可追溯到二十世纪中叶,法国海军军官库斯托发明了自携式水下呼吸器即当代常规轻潜技术,为包括考古学在内的海底科学探索提供了最基本的保证。1960年,美国宾西法尼亚大学考古学教授乔治·巴斯对土耳其格里多亚角海域的古代沉船遗址进行调查、发掘,这一水下考古事件被视为现代水下考古学诞生的标志。水下考古探测中所采用的任何方法技术必须能够适应各种复杂因素水域环境,在相关设备的水密性、弱信号提取、水下探测数据的成像方法等方面也具有较高的技术要求。
目前,水下考古调查方法可以归为以下两大类:光学和声学方法。
光学方法中,潜水调查是最为直接的一种方式,潜水员使用标线、网格和条带等工具对水下文物进行测量。可以肯定的是,因为可以对文物进行视觉识别,潜水调查是也将继续是水下探测中一个非常重要的手段。然而,这种人工的调查方式在复杂的水下环境中将会是一个十分耗时及高风险的作业过程,其给出的结论也带有潜水员的主观判断成分。水下摄影测量法为寻找更加客观真实的结论提供了一个不错的解决方案,通过对同一探测区域从不同角度拍摄一系列照片,工作人员可以对水底三维场景建模。然而,在希腊南艾维亚岛海湾的一艘希腊古沉船探测中,40~47米的水深严重制约了潜水员的可作业时间,所采集到的图像质量也因此受损。Drap等在意大利皮亚诺萨岛附近海域使用该技术开展过探测,他们摒弃了常规潜水人员手持摄像机的操作方式,而是将摄像机安装在水下机器人的“胳膊”上,这使得潜水人员所不能到达的高压深水区域的文物信息也能被收集到。无论是人工还是机器人操作,上述基于视觉图像的水下考古调查方法都具有一个共同的缺陷,那就是在深水、植被覆盖、天气影响强烈等条件下表现不佳。一方面,水下介质会改变光谱,摄像机所采集到信号会产生畸变;另一方面,糟糕的水下视觉环境将直接导致摄像机没办法接近一些小范围的遗迹区域进行记录,信息的缺失使得这一区域无法被完整重建。
声学方法是基于反射声波成像原理,在水下目标探测中应用最为广泛。其中,多波束声纳、侧扫声纳是识别和在地图上标定出露于水底的目标体的强有力工具。诸多实验和考古调查显示侧扫声纳可以对有机物和无机物、人造和天然材料进行成像。尽管如此,侧扫声纳呈现的图像常常是变形的,所包含目标体的真实三维信息较少;多波束声纳可以对水底地形地貌进行高精度实时三维成像,Plets等和 Westley等就曾使用高精度的多波束声纳识别出了海底的沉船和重建水底原始地形;通过对比分析前人对某处历史沉船的多波束海洋测深数据,Stieglitz等估计了热带气旋对该遗迹的损毁程度。近年来,我国水下考古捷报频传,声学探测方法(包括侧扫声纳及多波束)在浙江宁波上林湖越窑遗址、湖北丹江口水库均州古城、福建沿海东山县冬古湾明末清初沉船调查、安徽太平湖底城址调查、福建泉州水下考古重点调查、四川彭山江口沉银遗址水下考古及江西洪门水库摩崖造像水下考古等工作中得到了全面的应用,为水下考古目标的探查提供了有效的证据。
但是,不可回避的事实是,上述的光学和声学(侧扫和多波束等)方法也都具有一个共有的缺陷,即它们只能探测到水下遗迹的表面部分。这也就意味着,如果目标体是埋在水底并被沉积物完全覆盖的,从水底表层无法区分文物与自然环境,这样一来上述方法往往难以发挥出其优势。虽然浅地层剖面仪所发射的声波可以穿过水底进入到地层内部几米到几十米深的位置,但它的分辨率却无法满足小尺度文物(如陶瓷)的识别。
同时,另一大的问题——浅水域的多次波现象则严重制约了浅剖技术在水下考古探测中的应用,因为来自于水底的多次反射波所造成的假象将会对水底以下地层界面和遗址边界的划分产生较大干扰。
另外,近年来水域考古正在逐步引进的海洋磁力仪,依靠其对水下文物遗迹磁异常的高敏感度,可以寻找海底、湖底之下铁磁性目标物或其它类似瓷器这样的具有明显磁性的物品。但磁法勘探的体积效应明显,探测分辨率有很大的局限,往往只能分辨大尺度磁性异常体。因此,除了目前水下考古中常用的光学、声学类探测方法和磁法之外,仍需要探索一种操作方便、抗干扰能力强和高分辨率的探测方法,来作为常规水下考古探测方法的有效辅助手段。
三、水域雷达探测应用现状
探地雷达(GPR)是陆上考古中使用非常广泛的一种勘探方法,它所发射的宽频带电磁信号可以穿透地表进入地层而对文物不会造成任何影响,这种无损探测技术可以在水平和深度方向上对目标体进行高分辨率成像。随着探测准确率的增加和探测成本的降低,探地雷达越来越被广泛地应用于考古发掘工作之前的前期调查。
然而,截至目前,几乎没有发现任何有关探地雷达应用于水下考古调查的正式研究,这可能是因为探地雷达存在电磁波信号一遇到水就会迅速衰减掉的臆想造成的。值得庆幸的是,研究学者从未停止过对电磁波在水中传播的理论探索。Gourr等指出如果水的电导率不太高的话(< 0.02S/m),探地雷达其实是可以用于水下冲积物调查的;Aziz等在德克萨斯州休斯敦的某处历史公墓的掩埋物定位和特征分析的成果显示,即使是土壤层的电导率高达0.38S/m,探地雷达依然表现良好。Jr等的研究显示,如果有大量的波长大小的不均匀体存在,其所造成的散射将会是电磁波在水中传导损耗和介电驰豫主要原因。这也就解释了为什么用10MHz~200MHz 频带的雷达天线可以在电导率约为4S/m 的海水区域接收到15 米深的反射回波。总的来看,介质的电导率和不均匀性、天线中心频率和水深都是电磁波衰减的影响因素。
实际上,相对于复杂的地表介质(如粘土层),水是一种均匀介质,电磁波在淡水中传播的损耗要小得多。将探地雷达方法应用在水域调查项目中已有成功的案例。Kovacs 在阿拉斯加使用探地雷达探测冰层厚度的时候,他惊奇地发现无论是使用在冰层表面拖动还是用直升飞机悬空拖曳的方式,冰层下面的水深都可以一并被探测到;随后,Smith在原子湖用300MHz天线发现了较强的双曲线反射,后面证实这是湖底以下2.5米深处的金属物体所引起的;在Mellett的研究中,电磁脉冲信号可以穿透淡水层进入到湖底沉积物中,反射信号提供了沉积物分层、障碍物和基岩深度等信息;Abramov等使用自主设计的LOZA GPR对海底开展了一系列地质调查,通过一个大小为1000的补偿因子增强信号,使得电磁波可以到达1~2 米深的水底沉积物层;Lin 等结合浅剖和探地雷达两种方法对浅水环境进行地形成像和剖面解释,对比分析得到结果显示,在砂层和植被覆盖的区域,探地雷达可以提供相比于浅剖更多的沉积物详细信息。
探地雷达不仅可以像浅剖一样得到湖、河还有浅海区域的垂直切片图,也能像多波束声呐一样得到逼真的水底三维地形图。蔡辉等和郭秀军等使用探地雷达对水底淤泥厚度进行了高分辨率探测研究;Shields等通过解释探地雷达剖面图的水深信息最终画出了两处河水聚集带的水底地图,绘制了松软沉积物的厚度图。Sambuelli等使用探地雷达对波河进行了调查并根据反射波振幅估算了水底沉积物变化趋势。丁凯等和王国群等所开展的水下抛石层探测中,探地雷达剖面上可以识别水深将近5 米的河底界面。肖国庆等和谢磊磊等分别通过实测和正演模拟实现了对水下砂层厚度和分布范围的圈定。Lachhab等根据十八张探地雷达剖面图整合生成了三维的湖底地貌图,对比1971年水库建造之前绘制的水底地形图,沉积物这些年的堆积情况一目了然。这些都是潜水测量、摄影测量法、多波束声呐、侧扫和浅地表剖面仪等方法难以实现的。
上述水域雷达应用案例,从不同角度反映出探地雷达在水下地形成像和寻找水底掩埋物方面具有巨大潜力。如果能够将其引进到水下考古调查中,克服水下数据采集的困难,并充分发挥其便捷、高效、高分辨率的优势,探地雷达有望成为水下考古方法技术体系中的一个重要辅助利器。
四、水下考古雷达应用案例
宁波慈溪上林湖后司岙水域水下考古调查,是一次水下考古技术的综合运用,而探地雷达作为一次新方法新思路的大胆尝试,对已发现的水下文化遗存进行剖面探测,不但成功弥补了浅地层剖面仪无法探测浅水区的缺陷,而且其在水深超过3.5米的探测结果也可与浅地层剖面仪探测结果相互支持、印证,取得了良好成效,初步了解了水下文化遗存的淤埋深度、堆积厚度、剖面形状等埋藏信息。
⒈雷达探测的思路及设计
水下考古中的雷达探测必须要确保电磁波能够穿过水体,并入射进入水底地层,传播至掩埋在水下地层中的文物遗迹,并产生反(散)射,再经水体传播后被雷达接收天线接收。因此,在实际水域探测作业之前,需完成现场水体电性参数测试,从理论上计算出在这样的水体环境下雷达波的传播衰减,从而根据不同的水深实现不同中心频率天线的优选。同时,水体介电常数的获取,可为水体深度的计算和水底地形绘制提供精确的速度信息,也可为深部信号的衰减补偿计算提供参数。本次探测过程中采用美国POGO 介电参数测试仪,对水体进行了电性参数测试。
测量结果表明,测区内湖水平均相对介电常数为83,平均电导率为0.0036 S/m。由此,计算得到中心频率为100MHz的电磁波在湖水中的平均衰减因子为0.0745,雷达平均测距范围为13.42m。上林湖年平均水位不超过10m,因此100MHz 雷达天线可以在该水域进行有效勘探,更高频率的雷达天线勘探范围则受限于浅水区域。


本次水域雷达探测仅在侧扫声纳及多波束圈定的重点水域开展(如图1a)。为降低船只对雷达信号的影响,选用木船(尾部加装柴油发动机)作为水上载体,船底木板厚度为5cm,保证雷达波的绝大部分能量入射到水下(如图1b)。同时,为保证测距及定位的准确性,加装高精度差分GPS定位设备,以实时记录雷达测点坐标,并采用手持GPS对船只行进方向进行导航。
⒉典型雷达探测剖面成果
⑴湖底地形三维展示图
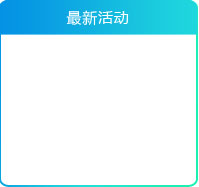
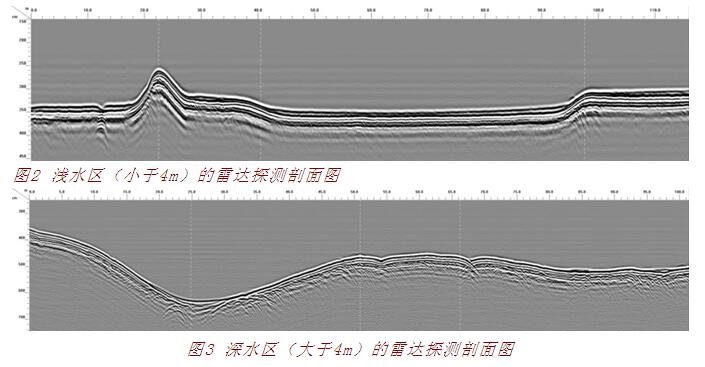
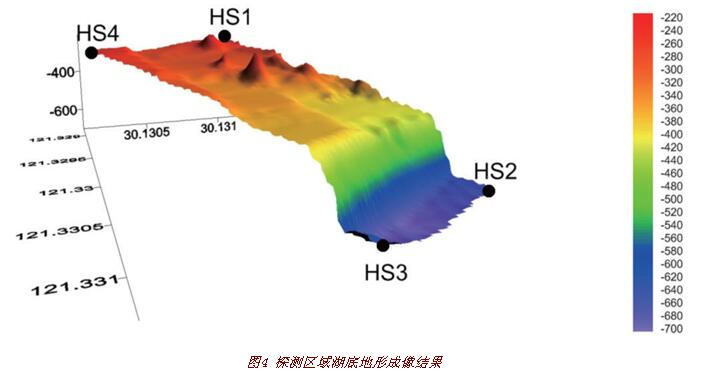
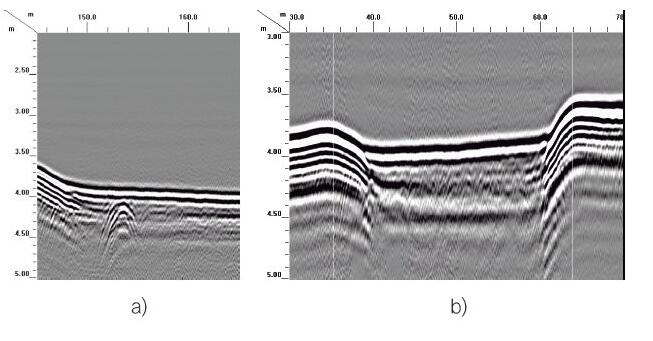
雷达波穿透水体到达湖底时,由于水与湖底土层之间的介电特性差异,会产生明显的反射;雷达波从高介电常数介质(水)入射到相对较低的介质(湖底地层或淤泥)中,反射系数为正,反射波的相位与发射子波同相。从雷达反射剖面上可以准确地拾取湖底反射波的初至,即获得雷达波从水面入射到湖底的双程旅行时间,由于前面已精确测得水体介电常数而计算出的电磁波传播速度,因此,可以精确地得到探测点的水深。一条雷达探测剖面,即可以获得一段精确的水深剖面,如图2、图3 分别给出了浅水区(水深小于4m)、深水区(水深大于4m)的一段雷达探测波形图(已进行背景去除及滤波等处理)。当将测区内所有测线的水深数据通过线性插值(本次采用的是Kriging 算法)并网格化,便可以绘制出探测水域的水下地形图(图4)。
由图4 可以清楚了解探测水域的水底地形起伏,探测区域为西南浅东北深的斜坡构造,最大水深差达5m,东北方向水深过渡带明显,水深大于6m的深部水域为原湖底,水深小于4m 的为原地表。原地表大部分区域较为平坦,个别区域存在局部凸起(图4中用A、B、C 标注),结合其它水下考古方法的探测结果,推测该凸起为水下圆形窑炉,可作为重点目标体进行进一步验证核实。
⑵湖底堆积物的雷达反射剖面
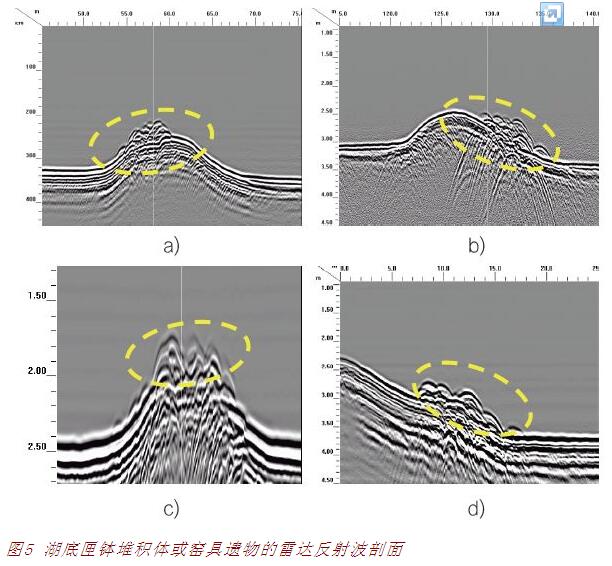
在湖水深小于3m的范围内,匣钵或瓷片堆积、窑具遗物等各类窑业遗存的上覆淤泥层可能较薄,甚至有部分或全部暴露在湖水中。雷达波入射到匣钵堆积体或窑具遗物表面时,这些点块状的目标会引起雷达波的散射,在雷达剖面上将看到湖底反射波同相轴出现错断,同时呈现出双曲型反射波的聚集带,由此可以圈定出陶器匣钵堆积体或窑具遗物的范围,我们称之为暴露型窑炉遗址(如图5所示)。
⑶湖底之下的掩埋物雷达反射剖面
由于湖水对雷达波的衰减较小(相对于粘土介质而言),因此水域雷达探测不仅仅能够圈定湖底堆积物(匣钵或窑具遗物等文物遗存)的位置,在雷达波传播至湖底界面时仍有足够的能量穿透湖底地层,入射至湖底地层之中,从而实现对湖底之下遗存物的探测。图6展示了三种不同类型的湖底地层之下的目标体雷达探测剖面。图6a中在可以清楚的地看到孤立目标体的双曲型绕射波,目标体上部淤泥覆盖层厚度约0.45m,其横向尺寸约为1.0m,考虑到探测区域为侧扫声纳重点关注的窑业遗址区,推测该目标体可能为孤立的窑具遗物;图6b中横向40.0~60.0m范围内,在湖底淤泥层(厚度约0.3m)之下,可以观察到杂乱而密集分布的双曲型反射波群,推测此处为碎瓷片堆积区;图6c中横向35.0~60.0m范围内,湖底淤泥之下存在强振幅弧形反射,与窑炉遗址外形有相似之处,推测可能为隐伏型窑炉遗址。

五、结语
考虑到水下考古工作环境、工作方法、工作时间的特殊性,以及传统水下探测技术的诸多局限,迫切要求有新的探测方法技术来为考古学者提供精准的水下文物空间分布相息。探地雷达方法以其高分辨率、高效率的优势在陆上浅地表探测领域广泛开展,而长期以来受限于“谈水色变”的误解,导致其在水下目标探测方面远未发挥出其特有的优势。在上林湖后司岙水域水下考古中,首次引入了探地雷达方法进行剖面探测,可以获得水下文化遗存的淤埋深度、堆积厚度、剖面形状等埋藏信息。与此同时,由于雷达剖面图中湖底反射界面清晰,可以整合测区内所有剖面非常精确地绘制出水底三维地形,正好配合侧扫声纳、多波束声呐等其它方法的探测成果,为水下文化遗存的后期发掘及保护提供更加准确的依据。
探地雷达方法所表现的数据采集快速简单、剖面成果的高分辨率特点,也预示着探地雷达在水下考古活动中大有可为。为了让探地雷达方法更好地应用并服务于水下考古活动,仍有许多的困难需要克服:硬件方面可以针对深水域作业,更改天线外观及水密性设计,使天线(甚至可以设计天线阵列)像声呐系统一样可以直接入水,在探测时尽可能地靠近水底,从而获得更丰富、更高分辨率的水下地层内的反射波数据,实现对掩埋在水下地层的文物目标的精确定位;其次在数据处理方面,根据电磁波在水体及不同地层内的传播特性,探索更合适的电磁波传播的衰减补偿方法,从而增加探地雷达的有效探测范围。
随着我国水下文化遗产专项资源调查的全面开展,水下考古正面临着一个重要的发展契机,如果可以加入探地雷达这一有效的生力军,克服所面对的困难,相信会有越来越多的水下秘密逐渐呈现在公众面前。
注:本文由“溪流之海洋人生”微信公众平台整理。